
Ileana Pirozzi
Mosaic Intelligence
multimodal perception, spatial intelligence, SLAM for vascular navigation, medical roboticsAn ECCV workshop on the data bottleneck for robust medical imaging AI.
A cross-disciplinary group shaping robust medical imaging, surgical data science, and clinical translation.
Mosaic Intelligence
multimodal perception, spatial intelligence, SLAM for vascular navigation, medical robotics
Purdue University / Indiana University School of Medicine / University Hospital Dresden
Translational medical image computing, surgical data science, and AI-supported cancer surgery.
Mosaic Intelligence
multimodal perception, spatial intelligence, SLAM for vascular navigation, medical robotics
Advanced Research, Intuitive
Surgical video understanding, workflow analysis, and medical computer vision.
UCL, United Kingdom
Robot vision and scene understanding for minimally invasive surgery.
DKFZ / Heidelberg University, Germany
Surgical data science, benchmarking, and reproducible evaluation.
Universidad de Zaragoza, Spain
Visual SLAM, deformable SLAM for endoscopy, EndoMapper.
CUHK, Hong Kong
Medical AI across MICCAI, IPCAI, and ICRA. Featured advisor
Featured advisor
TUD Dresden University of Technology / National Center for Tumor Diseases Dresden
NCT Dresden professor working on surgical data science, computer-assisted surgery, robotic vision, and AI-enabled clinical translation.
 Featured advisor
Featured advisorUniversity College London
Professor of Robot Vision, Co-Director of the UCL Hawkes Institute, and Royal Academy of Engineering Chair in Emerging Technologies.
 Featured advisor
Featured advisorNvidia
Computer vision and machine learning leader focused on visual perception, robotic systems, and robust real-time AI deployment.
Featured advisorPurdue University / Indiana University School of Medicine / University Hospital Dresden, TUD Dresden University of Technology
Physician-scientist leading translational medical image computing work across surgery, data science, AI-supported cancer surgery, and clinical translation.
AdvisorUniversity College London
Researcher focused on robot vision and scene understanding for minimally invasive surgery.
AdvisorGerman Cancer Research Center (DKFZ) / Heidelberg University
Researcher in surgical data science, benchmarking, and reproducible evaluation.

University College London PhD candidate working on surgical computer vision, 3D reconstruction, medical imaging, and the iMED dataset.

Universidad de Zaragoza PhD researcher developing colonoscopy SLAM, visual place recognition, and CLiMB2026 benchmarking.

Intuitive Surgical machine learning engineer organizing SurgVU and building surgical video understanding and high-resolution endoscopic datasets.
Advanced Research, Intuitive, with work in surgical video understanding, surgical workflow analysis, and medical computer vision.

Intuitive Surgical vision system analyst working on computational imaging and joint optical-software design for surgical imaging systems.

Intuitive Surgical machine learning and computer vision engineer developing AI-driven imaging technologies for surgical robotics.

Intuitive Surgical research scientist in computer vision and surgical robotics, with work on robot perception and surgical imaging datasets.

Intuitive Surgical machine learning engineer focused on surgical data science, real-time guidance, and multimodal skill assessment.

Uber AV Labs machine learning engineer focused on autonomous-vehicle perception, real-time systems, data curation, and robust computer vision evaluation.
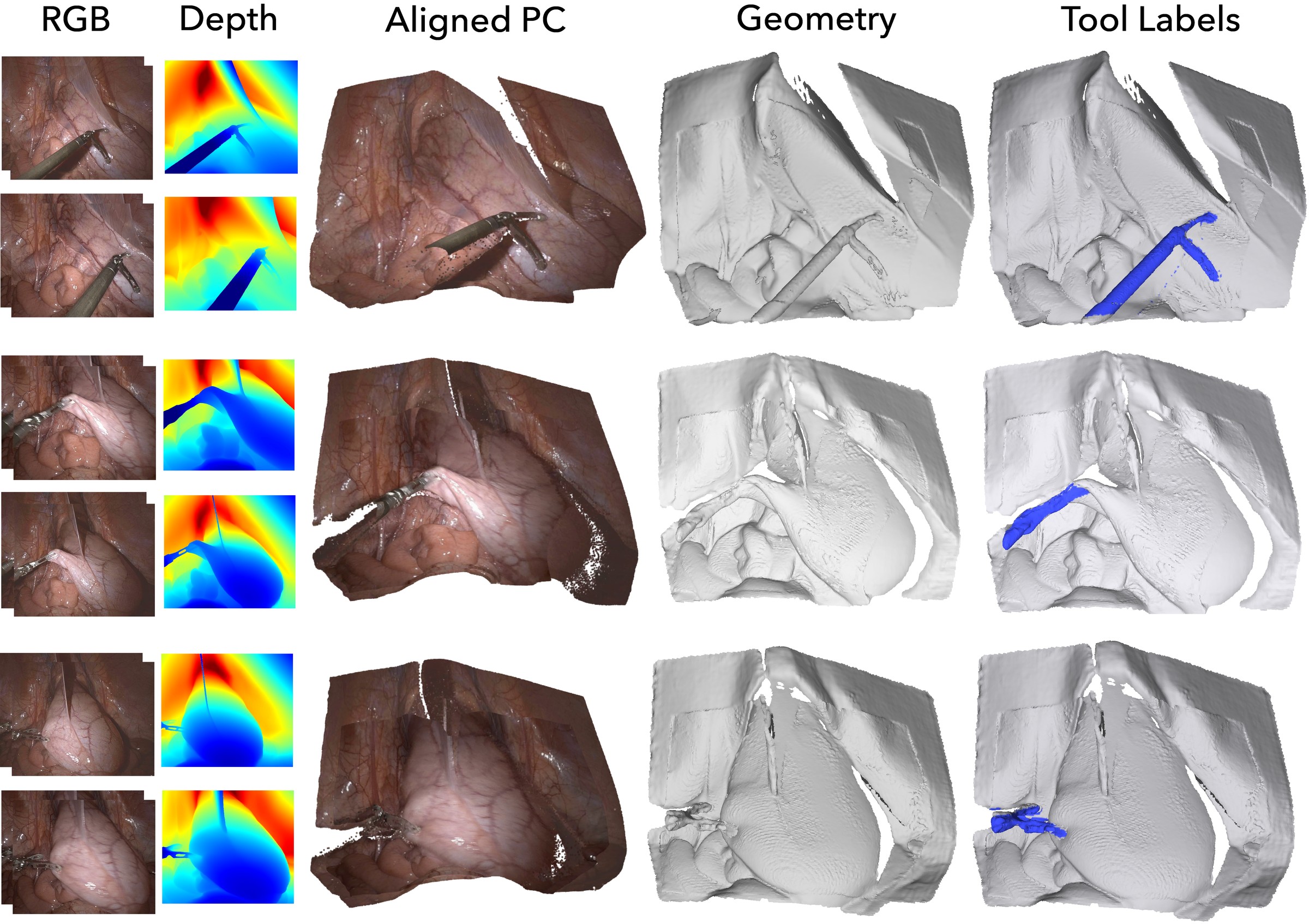
Multi-Endoscope Dataset for 3D Perception
iMED2026 is a MICCAI/EndoVis challenge on synchronized multi-endoscope data, with relative pose estimation and deformable novel view synthesis tracks for endoscopic 3D perception.
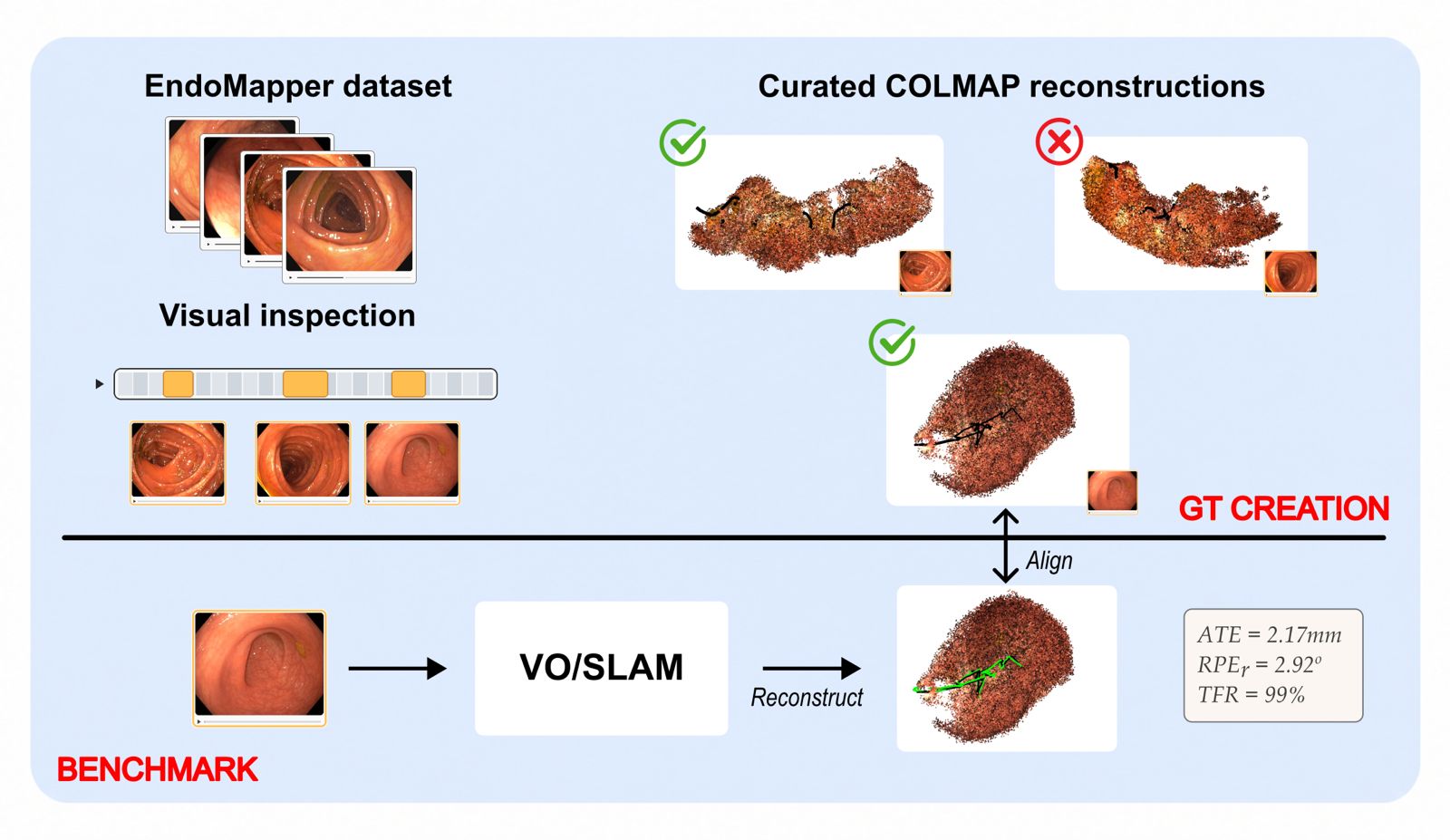
Challenge siteColonoscopy Localization and Mapping Benchmark
CLiMB2026 is an unpublished benchmark under development for colonoscopy localization and mapping. Public dataset access, paper details, and benchmark statistics will be added after organizer review.
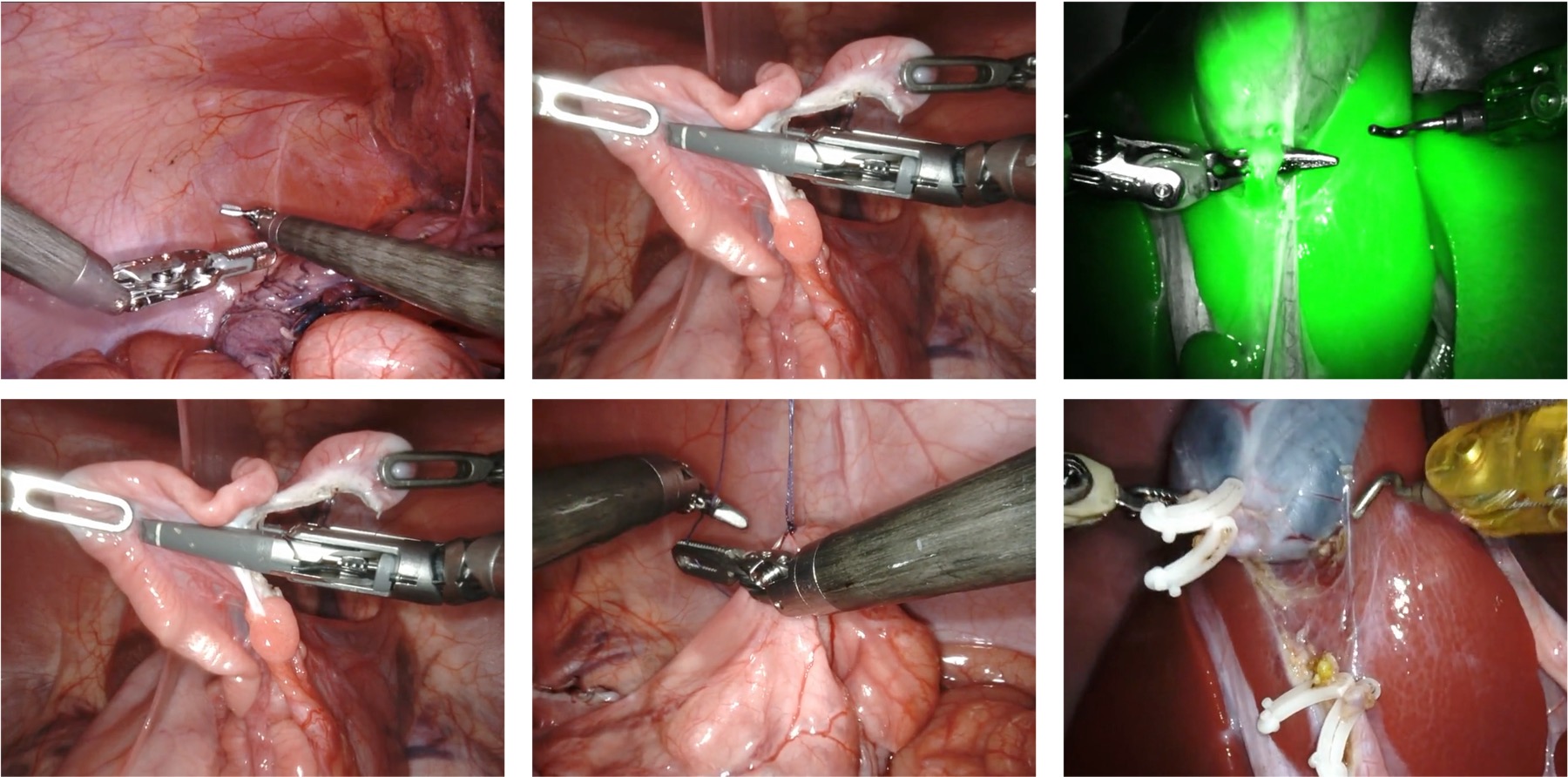
Surgical Visual Understanding Dataset Series
SurgVU focuses on large-scale surgical video understanding. DCA-MI highlights it as a dataset case study for real-world video curation and evaluation.
arXiv:2501.09209Multi-Endoscope Dataset for 3D Perception
iMED2026 is a MICCAI/EndoVis challenge on synchronized multi-endoscope data, with relative pose estimation and deformable novel view synthesis tracks for endoscopic 3D perception.
Challenge siteColonoscopy Localization and Mapping Benchmark
CLiMB2026 is an unpublished benchmark under development for colonoscopy localization and mapping. Public dataset access, paper details, and benchmark statistics will be added after organizer review.
Surgical Visual Understanding Dataset Series
SurgVU focuses on large-scale surgical video understanding. DCA-MI highlights it as a dataset case study for real-world video curation and evaluation.
arXiv:2501.09209Full papers in ECCV LNCS format. All submissions are reviewed via a standard double-blind OpenReview workflow by a dedicated program committee. Conflicts of interest are handled per ECCV workshop policies. Accepted papers are included in the workshop program for poster presentation.
Full papers, extended abstracts, and dataset or benchmark papers are welcome.
Papers already published and peer-reviewed at major computer vision, machine learning, medical imaging, robotics, or clinical AI conferences or journals. Submissions are not re-reviewed — the main criteria are topical fit and poster-board availability. Authors submit a link to the paper via the workshop’s OpenReview page.
Original Work: ECCV 2026 LNCS author kit — max. 14 pages excluding references (figures and tables included). Additional reference-only pages are allowed. See the ECCV submission policies.
Published Work: no reformatting — submit the camera-ready version as published at the original venue, plus a link on OpenReview.
Follow the ECCV 2026 submission policies — double-blind anonymization, no author-identifying links, dual-submission rules, and completed OpenReview profiles.
Original Work: double-blind peer review via OpenReview, one round, no rebuttal. Published Work: topical-fit screening only, not re-reviewed.
Poster presentation at DCA-MI 2026. A subset of Original Work papers may be invited for oral presentation.
Document source, consent, licensing, and coverage limits. Submissions with unclear protected-data handling may be desk-rejected.
University College London PhD candidate working on surgical computer vision, 3D reconstruction, medical imaging, and the iMED dataset.
Universidad de Zaragoza PhD researcher developing colonoscopy SLAM, visual place recognition, and CLiMB2026 benchmarking.
Intuitive Surgical machine learning engineer organizing SurgVU and building surgical video understanding and high-resolution endoscopic datasets.
Advanced Research, Intuitive, with work in surgical video understanding, surgical workflow analysis, and medical computer vision.
Intuitive Surgical vision system analyst working on computational imaging and joint optical-software design for surgical imaging systems.
Intuitive Surgical machine learning and computer vision engineer developing AI-driven imaging technologies for surgical robotics.
Intuitive Surgical research scientist in computer vision and surgical robotics, with work on robot perception and surgical imaging datasets.
Intuitive Surgical machine learning engineer focused on surgical data science, real-time guidance, and multimodal skill assessment.
Uber AV Labs machine learning engineer focused on autonomous-vehicle perception, real-time systems, data curation, and robust computer vision evaluation.
Featured advisor
TUD Dresden University of Technology / National Center for Tumor Diseases Dresden
Professor for Translational Surgical Oncology at NCT Dresden, working on surgical data science, computer-assisted surgery, robotic vision, and AI-enabled clinical translation.
Featured advisor
University College London
UCL Professor of Robot Vision, Co-Director of the UCL Hawkes Institute, and Royal Academy of Engineering Chair in Emerging Technologies, focused on surgical robotics and AI for minimally invasive interventions.
Featured advisor
Nvidia
Computer vision and machine learning leader focused on visual perception, robotic systems, and robust real-time AI deployment.
Featured advisorPurdue University / Indiana University School of Medicine / University Hospital Dresden, TUD Dresden University of Technology
Physician-scientist leading translational medical image computing work across surgery, data science, AI-supported cancer surgery, and clinical translation.
Advisor
University College London
UCL researcher focused on robot vision and scene understanding for minimally invasive surgery.
Advisor
German Cancer Research Center (DKFZ) / Heidelberg University
DKFZ and Heidelberg University researcher in surgical data science, benchmarking, and reproducible evaluation in medical AI.